|
در این مقاله به مدلسازی سیستم عصبی عضلانی راه رفتن برای فرد
دچار عارضه نخاعی و بررسی تکنیک های
توانبخشی روی آن پرداخته شده است.
برای این
منظور ابتدا مدلسازی راه رفتن برای فرد سالم و سپس تعمیم آن به
مدل فرد دچار عارضه نخاعی انجام شده است. در سیستم کنترل عصبی
عضلانی فرد سالم دو راهبرد عمده مورد استفاده قرار گرفته که
شامل مولد الگوهای مرکزی و رفلکسهای عصبی هستند.
مولد الگوی
مرکزی وظیفه تولید الگوهای ریتمیک و رفلکس
های عصبی هماهنگی حرکت سگمنتها و حفظ پایداری را به
عهده دارند.
نتایج
حاصل از مدلسازی با داده های تجربی مقایسه و نتیجه گیری شده که
معماری به کار گرفته شده عملکرد مطلوبی داشته است.
در ادامه
برای تعمیم مدل به حالت عارضه نخاعی سیگنال درایوی که از مغز
به مولد الگوی مرکزی وارد می شود
کاهش پیدا کرده است. سپس برای سنجش تکنیک
های توانبخشی سیگنال فیدبک تقویت شده و نشان داده شده
که این روش عملکرد مطلوبی در بازیابی توان راه رفتن داشته است.
با توجه به
اینکه این نتیجه به خوبی با برنامه
های توانبخشی کلینیکی بیماران مطابقت داشته نتیجه گیری شده است
که مدل پیشنهاد شده به خوبی می
تواند تأثیر تکنیکهای توانبخشی را توصیف نماید.
واژگان کلیدی: عارضه نخاعی، CPG، توانبخشی، کنترل عصبی عضلانی
1. مقدمه
به جرأت می توان گفت راه رفتن اساسی ترین نیاز بشر برای حرکت
کردن و انجام فعالیت های مختلف روزانه است. اهمیت این
مسئله را می توان در مشکلات افرادی مشاهده کرد که به دلیل
معلولیت از این امکان محروم شده اند.
از طرف
دیگر معلولیتها انواع مختلفی دارند که یکی از مرسومترین آنها
عوارض نخاعی است. در یک بررسی آماری مشخص شده است که تنها 7/7%
مشکلات نخاعی به صورت مادرزادی بوده است. بنابراین می
توان گفت که بازیابی توان راه رفتن از طریق فرایندهای توانبخشی
به عنوان یک دغدغه اساسی برای یک جامعه به شمار می آید.
با توجه به پیچیدگی سیستم عصبی مرکزی انسان ،
توانبخشی بسیاری از عوارض نخاعی ناشناخته مانده است. به
همین دلیل مدلسازی سیستم کنترل راه رفتن می تواند تأثیر
قابل توجهی در شناسایی تکنیکها و ارتقاء اثربخشی آنها در
بازیابی توان راه رفتن داشته باشد.
از سوی
دیگر مطالعات مختلف ثابت کرده اند که مراکز کنترلی در نخاع
وجود دارد که الگوهای حرکتی را برای راه رفتن تولید می
کنند[1]. بنابراین این مراکز که با عنوان مولد الگوهای مرکزی (
CPG) شناخته می شوند، بخش مهمی از مدلهای سیستم کنترل
راه رفتن را تشکیل می دهند.
اگرچه مکانیزم واقعی عملکرد CPG هنوز مشخص نشده است، محققان بر
این فرضیه استوار هستند که مدارهای عصبی CPG از نوسانگرهای
عصبی متعددی تشکیل شده است که انواع مختلف حرکات ریتمیک را در
بدن تولید می نمایند.
مدل نیم مرکز
از قدیمی ترین مدلهایی است که در اوایل قرن 19 میلادی برای
توصیف حرکات در جانوران پیشنهاد شد[1, 2] که تطابق خوبی با
سیستم حرکتی جانوران دارد.
سادگی مدل
نیم مرکز سبب شده است که این مدل همچنان به عنوان یکی از
معماری های مطلوب CPG در کارهای مختلف مورد استفاده قرار بگیرد
[3-5].
در کنار
مزایایی که مدل نیم مرکز دارد ساختار ساده ی آن سبب شده
است که این مدل نتواند در برخی از شرایط عملکرد مطلوبی را از
خود نشان دهد. به همین دلیل تلاشهای زیادی برای اصلاح ساختار
مدل نیم مرکز ساده انجام شد که یکی از آنها استفاده از سلول
رنشا در مدل بوده است[2, 6].
با این وجود
در اواخر سده 19 میلادی مدل UBG به عنوان مهمترین رقیب مدلهای
پایه نیم مرکز پا به عرصه وجود گذاشت که توانایی تولید الگوهای
حرکتی پیچیده را داشت[2, 7, 8]. علیرغم این مزیت این مدل در
توصیف برخی از پدیده ها نظیر پدیده حذف در حرکات
جانواران ناتوان بود.
به همین دلیل
برای برطرف نمودن این مشکل محققان نسل جدیدی از CPG ها را
پیشنهاد دادند که نواقص مدلهای قبل را نداشت. این مدل، مدل نیم
مرکز دو لایه (TLHC) نام داشت که شامل دولایه مجزا برای تولید
ریتم و تشکیل الگو بود [1, 2, 9]. وجود این دولابه سبب می
شد که تولید الگوهای حرکتی پیچیده توسط CPG امکانپذیر باشد.
علیرغم عملکرد قابل قبول TLHC استفاده از این مدل در سیستم های
نورومکانیکی که پا به صورت یک مدل بیومکانیکی چند سگمنتی در
نظر گرفته شده باشد همچنان یک دغدغه است.
در این قبیل
موارد علاوه بر تولید الگوهای نوسانی ایجاد هماهنگی بین
سگمنتهانیز یک نگرانی به شمار می آید. البته در مطالعات
گذشته برای این مقوله و برای مدلهای غیر از TLHC پیشنهادهایی
ارائه شده است که از جمله آنها می توان به استفاده از شبکه های
CPG [10-12] یا به کارگیری رفلکس های عصبی بدون CPG اشاره
نمود[13, 14]. از سوی دیگر نوروساینتیست ها معتقدند که تولید
الگوها و هماهنگی با همکاری مشترک CPG رفلکس انجام می
شود [15, 16].
از سوی دیگر بازیابی توان حرکتی بعد از ضایعات نخاعی همواره
یکی از فعالیتهای مرسوم در حوزه ی توانبخشی عصبی بوده که تکنیک
های کلینیکی متنوعی در ارتباط با این مسئله پیشنهاد شده است
[17, 18]. علیرغم این گستره وسیع بررسی این فعالیتها از دیدگاه
تئوری تاکنون چندان مورد مطالعه قرار نگرفته است.
تنها
تحقیقاتی که در این راستا انجام شده مربوط به مقالات مارکین و
همکارانش [19] و اسپاردی و همکارانش [20] بوده است. در این دو
تحقیق نویسندگان مقاله تقویت سیگنالهای فیدبک را که یکی از
تکنیکهای مرسوم در توانبخشی بیماران ضایعات نخاعی است مورد
توجه قرار داده اند. آنها در این کارها میزان کارایی این تکنیک
را با آزمودن آن روی یک مدل نورومکانیکی بر پایه TLHC که به
مدل فرد دچار ضایعه نخاعی تعمیم داده شده بررسی کردند.
با این وجود استفاده از TLHC در مقالات مذکور بیانگر آن است که
با توجه به مطالب قبل، مدلسازی آسیب نخاعی و بررسی تئوری
آزمونهای توانبخشی تنها برای مدلهای بیومکانیکی تک سگمنتی و
ساده انجام شده است.
سادگی این
مدل سبب می شود که تأثیر واقعی تکنیکهای توانبخشی به
خوبی توسط این مدل قابل پیش بینی نباشد. با توجه به این
مسئله در این مقاله مدلی برای سیستم بیومکانیکی پیشنهاد شده که
به کمک آن می توان پاسخ های واقعی تری را
نسبت به آزمونهای توانبخشی به دست آورد.
این
مدل شامل دو سگمنت ران و ساق بوده که در آن پنج عضله برای به
حرکت درآوردن اندامها استفاده شده است. راهبرد عصبی که برای
تحریک عضلات و کنترل حرکت اندامها به کار گرفته شده شامل
استراتژی ترکیبی CPG و رفلکسهای عصبی است که با توجه به
مطالعات نوروساینتیستها با سیستم واقعی کنترل عصبی انسان تطابق
دارد [15, 16]. این انطباق امکان بررسی دقیقتر اثر تکنیکهای
توانبخشی را به خوبی فراهم می کند.
در استراتژی فوق از یک TLHC به عنوان CPG استفاده شده است که
وظیفه تولید حرکات پریودیک و الگوهای راه رفتن را به عهده
دارد. از سوی دیگر رفلکس های عصبی هماهنگی بین حرکت دو سگمنت
پا را انجام می دهند که منجر به تولید راه رفتن پایدار
می شود.
پنج عضله ای
که در این کار در نظر گرفته شده اند شامل گروه فلکسور هیپ،
گلوتئوس، وستی گروپ، همسترینگ و سولئوس هستند که TLHC روی دو
عضله اول و رفلکس ها روی سه عضله بعد عمل می کنند.
مدل فرد دچار
عارضه نخاعی نیز با کاهش سیگنال مغز وارد شده به TLHC استخراج
شده است و اثر تکنیکهای توانبخشی از طریق تقویت سیگنالهای
فیدبک وارد شده به TLHC بررسی شده است. مقایسه ای که بین شبیه
سازیهای این مقاله و داده های تجربی انجام شده نشان دهنده
درستی روند به کار گرفته شده در این مقاله است.
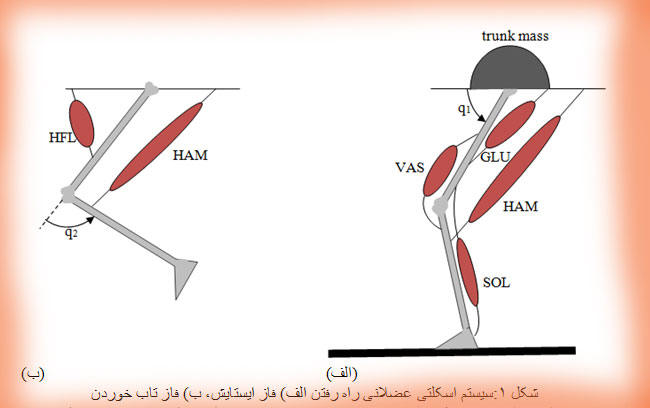
مدلی که برای تشریح سیستم کنترل راه رفتن ارائه شده است شامل
ترکیبی از مدل اسکلتی عضلانی و سیستم عصبی عضلانی است. سیستم
اسکلتی عضلانی در برای حالت های
ایستایش و تاب خوردن در شکل 1 نشان داده شده است.
با توجه به
این شکل پا به صورت یک مجموعه ی دو سگمنتی شامل ران و
ساق در نظر گرفته شده است که حرکات آنها توسط پنج عضله کنترل
می شود. این عضلات شامل گروه گلوتئوس (GLU)، فلکسور هیپ
(HFL)، همسترینگ (HAM)، وستی گروپ (VAS) و سولئوس (SOL) هستند.
عضلات GLU و
HFL به صورت آنتاگونیست روی مفصل هیپ عمل می کنند که سبب
دوران استخوان ران حول مفصل هیپ می شوند. از طرف دیگر
عضله HAM به همراه VAS با اتصالات خاصی که با استخوان
های ران و ساق دارند بر زاویه ی زانو تأثیر می
گذارند. همچنین عضله SOL با همکاری عضله HAM نقش مهمی را در
فاز ایستایش و پرتاب بدن به جلو ایفا می کنند که این عمل
با اکستنشن زاویه هیپ انجام می شود.
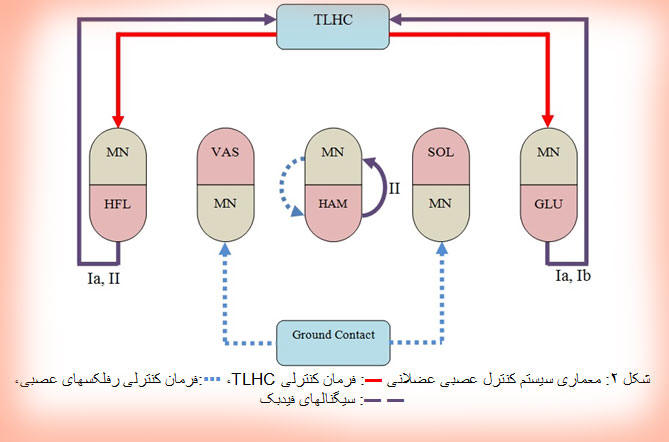
از طرف دیگر طرحی که برای سیستم کنترل عصبی عضلانی جهت کنترل
حرکت اعضا پیشنهاد شده در شکل 2 نشان داده شده است. همانگونه
که از این شکل بر می آید سیستم کنترل عصبی عضلانی از
همکاری دو طرح سیستم کنترل کننده مرکزی (CPG) و مجموعه
رفلکسهای عصبی تشکیل می شود. در سیستم کنترل کننده مرکزی
از یک CPG از نوع TLHC استفاده شده است که وظیفه کنترل
فعالسازی عضلات GLU و HFL را به عهده دارد. این قسمت ضمن اینکه
عامل تولید حرکت نوسانی در اعضا است، وظیفه تنظیم زمانبندی
حرکات ایستایش و تاب خوردن را نیز به عهده دارد.
بنابراین
وجود این قسمت نیاز به سوئیچ کننده خارجی را برطرف می
کند. از طرف دیگر رفلکسهای عصبی با عملکردی که روی عضلات VAS،
HAM و SOL دارند سبب ایجاد هماهنگی بین حرکات ساق و ران و در
نتیجه پایداری حرکات می شود. همانگونه که از این شکل بر می
آید عضله HAM با دریافت پسخوراند از اعصاب گروه II و عضلات VAS
و SOL با تحریک نیروی تماس زمین فعال می شوند.
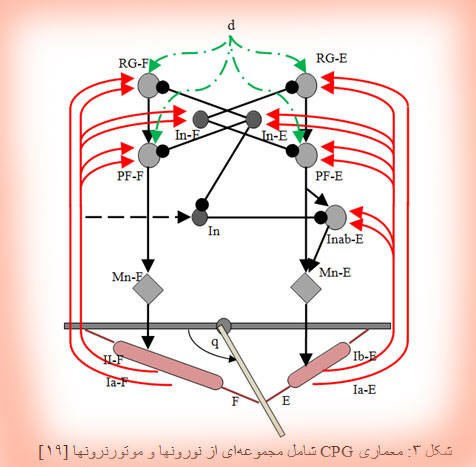
1.2 مدلسازی دینامیکی CPG
مدلی که در اینجا برای CPG استفاده شده از نوع TLHC بوده و
شامل مجموعه ای از نورونها، اینترنورونها و موتورنورونها
است که در شکل 3 نشان داده شده است [19]. این مجموعه همانگونه
که در شکل نشان داده شده مسئول کنترل ماهیچه های
آنتاگونیست GLU و HFL است که حرکات فلکشن-اکستنشن را انجام می
دهند. کوپل های مهاری که از طریق اینترنورونها به نورون
های متضاد می رسد عملکرد آنتاگونیست آنها را ایجاد می
کند. به عبارت دیگر هنگامی که یک طرف فعال است اینترنورون
مهاری متناظر با آن مانع از پلاریزه شدن طرف دیگر می شود.
البته سیگنالهای فیدبک نیز که در ادامه بیشتر توضیح داده می
شوند نقش مهمی در عملکرد آنها دارد.
برای مدلسازی نورونها از مدل هوکین-هوکسلی استفاده شده است. در
این مدل غشاء نورون به صورت یک خازن در نظر گرفته می شود که
جریان های الکتریکی مختلفی از آن عبور می کند. این جریانها
شامل جریانهای یونی، سیناپسی، نشتی، فیدبک و سیگنالهای مغزی می
باشند.
2.2 مدلسازی رفلکسهای عصبی:
در طراحی رفلکس های عصبی سیگنال
های تک سیناپسی به کارگرفته شده اند که اطلاعات سنسوری
مختلف را با توجه به شکل 2 به موتورنورون عضلات HAM، SOL و VAS
منتقل می کنند.
اطلاعات
سنسوری به گونه ای انتخاب شده اند که از یک سو این
رفلکسها بتوانند پایداری حرکات را تضمین نمایند و از سوی دیگر
عضلات با الگویی که با حالت واقعی مطابقت دارد فعال شوند.
بر این اساس
برای فعالسازی عضله HAM سیگنال گروهII آوران این عضله به کار
گرفته شده است که با استفاده از آن این عضله از اواخر فاز تاب
خوردن تا اواخر فاز ایستایش در حالت فعال قرار داشته و عمل
اکستنشن مفصل هیپ را در حالت ایستایش تسهیل می کند. از
طرف دیگر عضله SOL نقش مهمی را در ابتدای فاز ایستایش برای
تحمل وزن تنه و پرتاب بدن به سمت جلو ایفا می کند.
بنابراین
میزان بار ناشی از وزن بدن که روی هر پا اعمال می شود می
تواند پیام دهنده مناسبی برای فعال سازی عضله SOL باشد. بر این
اساس از نیروی تماس با زمین به عنوان سیگنال سنسوری مناسب جهت
فعالسازی عضله SOL استفاده شده است.
از طرف
دیگر چون گشتاور عضله SOL سبب فلکشن زانو نیز می شود به
منظور جلوگیری از ناپایداری حرکات، عضله VAS که وظیفه اکستنشن
زانو را به عهده دارد هم زمان با SOL فعال می شود.
با توجه به
این واقعیت برای فعالسازی عضله VAS مانند عضله SOL از سیگنال
نیروی تماس با زمین استفاده شده است. بنابراین می توان
فعال شدن موتورنورونهای عضلات مذکور را با استفاده از
سیگنالهای رفلکس عصبی محاسبه کرد.
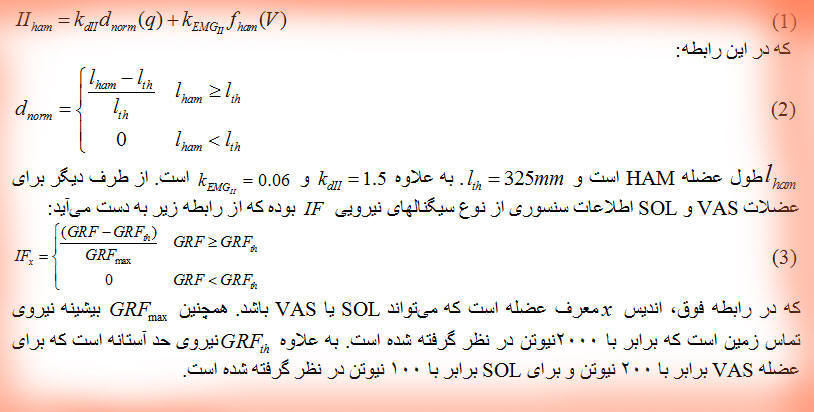
برای
این منظور از روابط هوکین-هوکسلی استفاده می شود [19] که در آن
اطلاعات سنسوری به عنوان جریان تحریکی نورون به کار گرفته می
شود. جریان های اطلاعات سنسوری برای هرعضله مطابق با
مطالب فوق به دست می آید. به این ترتیب برای عضله HAM
این جریان برابر با سیگنال گروه II آوران این عضله ( ) است که
از رابطه زیر محاسبه می شود:
نتایج در دو بخش برای فرد سالم و فرد دچار ضایعه نخاعی بررسی
می گردد. نتایجی که برای فرد سالم ارائه شده با داده های
تحربی که از [21] گرفته شده مقایسه می شود.
این مقایسه
روی سینماتیک حرکات و الگوهای فعال شدن عضلات انجام می
شود و به کمک آن صحت مدل نورومکانیکی پیشنهاد شده بررسی می
گردد. در بخش بعد با کاهش سیگنال عصبی وارد شده به TLHC مدل
فرد دچار ضایعه نخاعی استخراج می گردد. از این مدل برای
بررسی تأثیر تکنیکهای توانبخشی که در برنامه های کلینیکی
پیشنهاد می شود استفاده می گردد. یکی از مرسومترین
راهکارهایی که در توانبخشی بیماران ضایعه نخاعی مورد استفاده
قرار می گیرد تقویت سیگنالهای آوران به ویژه سیگنال Ib
است که در نتایجی که در اینجا ارائه شده تأثیر این راهکار روی
مدل به خوبی مشاهده شده است.
1.3
نتایج مدل پیشنهاد شده برای فرد سالم:
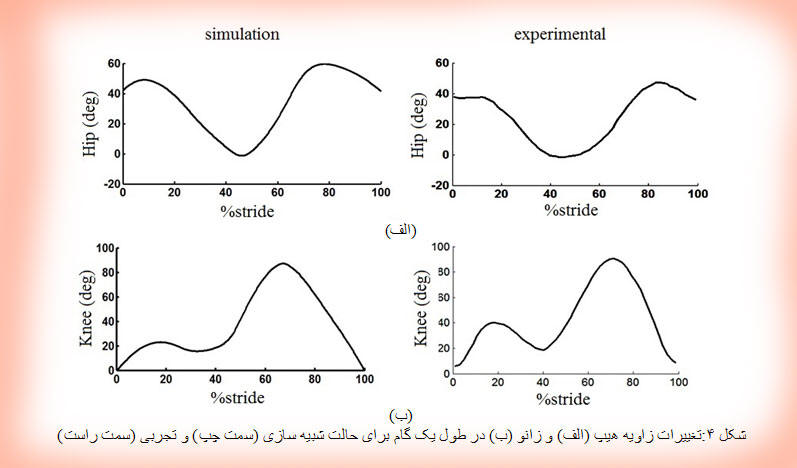
یکی از پارامترهای مهم در مطالعه حرکت راه رفتن انسان بررسی
ویژگی های سینماتیکی در طول گام برداشتن است. نمودارهای
ارائه شده در شکل 4 تغییرات زوایای هیپ و زانو را در یک گام
نشان می دهند.
در این
شکل نتایج حاصل از شبیه سازی با نتایج تجربی که از مرجع
[21] گرفته شده مقایسه شده است. شباهت نتایج شبیه سازی
با داده های واقعی صحت مدلسازی ها را نشان می دهد.
این شباهتها هم در نحوه تغییرات و هم در دامنه آنها مشهود است.
به عنوان نمونه در نموداری که برای مفصل هیپ ارائه شده نقطه
حضیض که تعیین کننده زمان سوئیچ شدن از ایستایش به تاب خوردن
است، در هر دو حالت شبیه سازی و واقعی در حوالی 45 درصد پریود
گام برداشتن اتفاق افتاده است.
این
مسئله نشان می دهد که TLHC که کنترل کننده زمانبندی
حرکات است به خوبی زمانهای ایستایش و تاب خوردن را تنظیم نموده
است. از طرف دیگر در نموداری که برای مفصل زانو ارائه شده وجود
دو قله در فازهای ایستایش و تاب خوردن قابل مشاهده است. بروز
این قله ها به دلیل فعالیت عضلات مختلف در طول یک گام
است که با یک الگوی مشخص اتفاق می
افتد. به عنوان مثال به وجود آمدن قله اول ناشی از عملکرد عضله
SOL برای پرتاب بدن به سمت جلو است که همانگونه که پیش از این
گفته شد با مقاومت عضله VAS برای حفظ پایداری همراه می
شود. از طرف دیگر بروز قله دوم از همکاری عضله HAM و HFL حاصل
می شود که به دلیل جلوگیری از برخورد پا با زمین اتفاق
می افتد. بنابراین از نزدیکی روند تغییرات زوایای مفاصل
می توان نتیجه گیری نمود که نحوه فعالیت عضلات و در
نتیجه راهبرد کنترل عصبی عضلانی به کار گرفته شده در این
مطالعه قابل قبول است.
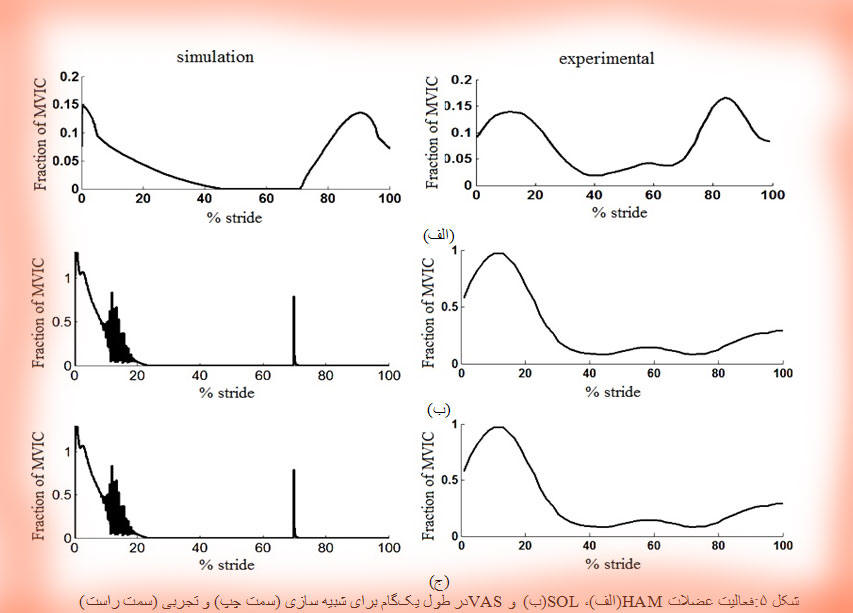
از طرف دیگر، الگوهای فعال شدن عضلات چگونگی عملکرد سیستم
کنترل عصبی عضلانی را در یک حرکت نشان می دهد. چنانکه
قبلاً گفته شد در این مطالعه در کنار طرح CPG از ایده ی
رفلکسهای عصبی برای تأمین پایداری و حفظ هماهنگی بین سگمنتها
در حین گام برداشتن استفاده شده است.
شکل 5
تغییرات مقدار حداکثر انقباض ایزومتریک ( MVIC ) را برای عضلات
HAM، SOL و VAS در طول یک گام نشان می دهد که نتایج شبیه سازی
با داده های تجربی مقایسه شده است[21]. با توجه به مطالبی که
در بحث رفلکسها ارائه شد، عضله HAM توسط سیگنال گروه II آوران
خود تحریک می شود. این تحریک منجر به تولید الگویی می
شود که در شکل 5 الف نشان داده شده است. شباهت نتایج شبیه سازی
با داده های تجربی نشان دهنده صحت روش مورد استفاده برای
فعالسازی عضلات HAM در چرخه راه رفتن است.
از سوی
دیگر ، همانگونه که از شکل 5 ب برمی آید، عضله SOL
مقدار حداکثر خود را در مراحل ابتدایی فاز ایستایش اختیار می
کند. همچنین با مقایسه نمودارهای مربوط به فعالیت عضلات مشخص
می شود که این عضله بیشترین مقدار MVIC را در میان تمام
عضلات در نظر گرفته شده در این مطالعه دارا است. این واقعیتها
بر اهمیت عملکرد SOL در فاز ایستایش برای تحمل وزن بدن و پرتاب
بدن به جلو دلالت دارد. بر این اساس، مشاهده ی رفتارهای
مشابه در نتایج تجربی نشان می دهد که استفاده از نیروی تماس
زمین برای انتقال اطلاعات به عضله SOL انتخاب مناسبی بوده است.
به
همین ترتیب، تجزیه و تحلیل مشابهی را می توان برای عضله VAS
ارائه کرد (شکل 5 ج). همانگونه که گفته شد این عضله نقش مهمی
را در جلوگیری از فلکشن بیش از حد زانو در فاز ایستایش و در
نتیجه ناپایداری حرکت به عهده دارد که با طرح در نظر گرفته شده
برای فعالسازی این عضله نتایج مطلوب حاصل شده است.
به طور کلی، از نزدیکی داده های تجربی و شبیه سازی می توان به
مناسب بودن معماری پیشنهاد شده برای سیستم کنترل عصبی راه رفتن
درافراد سالم پی برد. در قسمت بعد این مدل به حالت عارضه نخاعی
تعمیم داده می شود که در آن به برای بررسی تأثیر برنامه
های توانبخشی در بیماران نخاعی پرداخته می شود.
2.3 مطالعه برنامه های توانبخشی در مدل بیمار عرضه نخاعی:
در این قسمت با تعمیم مدل نورومکانیکی پیشنهاد شده برای راه
رفتن به مدل فرد دچار عارضه نخاعی، کارایی تکنیک های توانبخشی
روی این بیماران از دیدگاه تئوریی مورد بررسی قرار می
گیرد.
رویکرد
به کار گرفته شده در این تحلیل مشابه رویکردی است که مارکین و
همکارانش [19] و اسپاردی و همکارانش [20] داشته اند با این
تفاوت که در اینجا نشان داده می شود که استراتژی مورد
بررسی در مقالات مذکور، یعنی تقویت سیگنالهای فیدبک، تنها برای
عوارض نخاعی ناقص کارایی مطلوبی دارد.
به عبارت
دیگر، در مشکلات نخاعی شدید این روش باید با روشهای مکمل همراه
شود تا عملکرد مطلوبی حاصل شود. این نتیجه البته با مطالعات
هابلی و دیتز [22] همخوانی دارد که گزارشاتی را در زمینه
اثربخشی تکنیکهای بالینی برای بازیابی توان راه رفتن در مشکلات
خفیف و شدید نخاعی ارائه کرده اند.
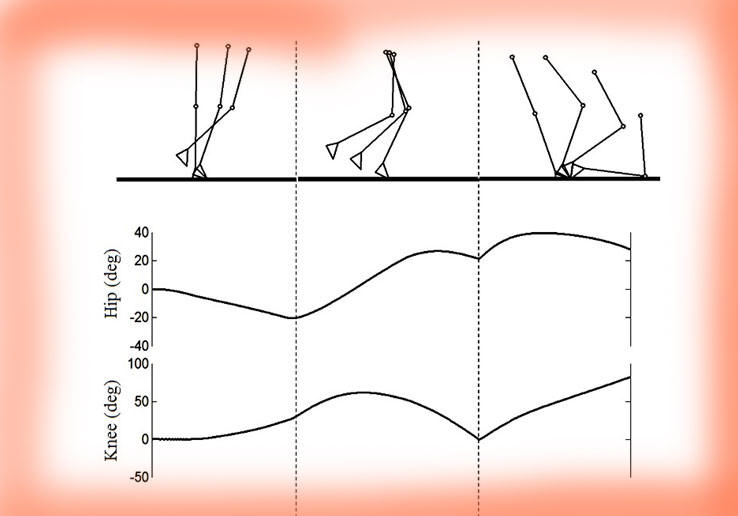
بر این اساس عارضه ناقص نخاعی با کاهش سیگنال درایو تا مقدار
1.5 شبیه سازی شده است. نتایجی که از این شبیه سازی به
دست آمده در شکل 6 نشان داده شده است. با توجه به این شکل
بیمار اگرچه توانسته تعادل خود را در گام اول حفظ نماید، در
فاز ایستایش گام دوم نتوانسته حرکت خود را ادامه دهد و به زمین
خورده است. این وضعیت می تواند به خوبی توصیف
کننده حالت عارضه نخاعی ناقص باشد که در آن بیمار به طور کامل
توانایی راه رفتن خود را از دست نداده اما به دلیل ضعف سیگنال
کنترلی قادر به تداوم حرکت نیست.
از طرف دیگر هابلی و دیتز [22] در مطالعات خود گزارش کرده اند
که مشکلات راه رفتن در عوارض نخاعی ناقص را می توان با
آموزش های حرکتی تا حد قابل قبولی برطرف کرد.
آنها
همچنین تصریح کرده اند که اثر بخشی این آموزشها از
دیدگاه فیزیولوژیکی به دلیل تقویت سیگنالهای آوران است که از
اندامها به مراکز کنترل راه رفتن در نخاع منتقل می شود و
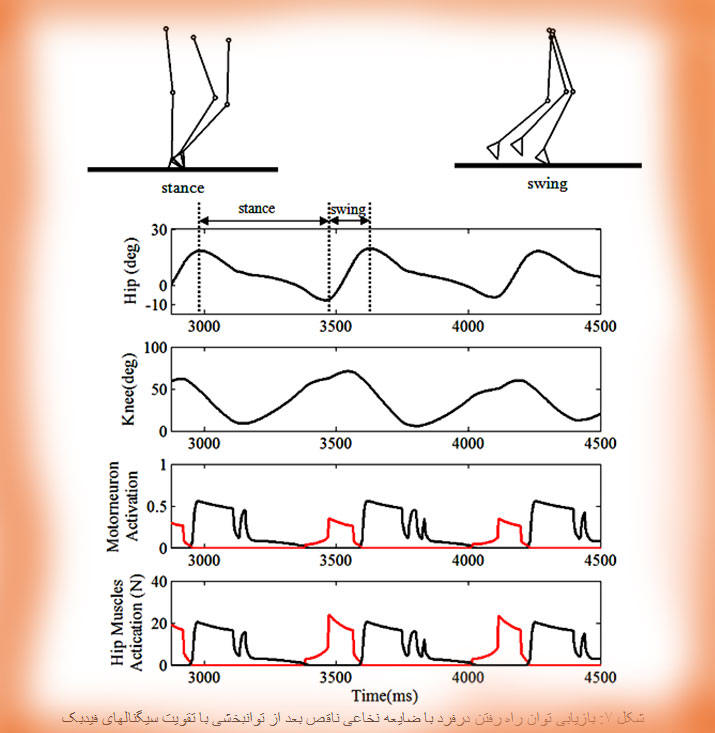
در این میان سیگنالهای Ib بیشترین تأثیر را دارا هستند. برای
بررسی این واقعیت در اینجا، در مدل استخراج شده برای عارضه
ی نخاعی ناقص سیگنالهای آورانی که به TLHC وارد می شدند،
تقویت گردیدند. به این ترتیب که سیگنال Ib عضله GLU تا 3 برابر
و سیگنالهای Ia عضله GLU و Ia و II عضله HFL تا 2 برابر تقویت
شدند.
نتایج
حاصل از این تغییرات در شکل 7نشان داده شده است. با توجه به
این شکل، الگوهای منظم و تکرار شونده-ای در حرکت فرد مشاهده می
شود که نشان دهنده موفقیت تکنیک مذکور در بازگرداندن توان راه
رفتن به فرد است.
در این مقاله تأثیر تکنیکهای توانبخشی در بیماران دچار عارضه
نخاعی برای بازگرداندن توان راه رفتن از دیدگاه تئوری مورد
بررسی قرار گرفت. برای این منظور ابتدا مدل راه رفتن فرد سالم
استخراج شد که در آن پا با دو سگمنت به همراه پنج عضله در نظر
گرفته شد. در سیستم کنترل عصبی عضلانی از استراتژی ترکیبی TLHC
و رفلکسسهای عصبی استفاده شده که با توجه به مطالعات بیولوژیک
بیشترین مطابقت را با سیستم کنترل عصبی بدن دارد. سپس برای
مدلسازی فرد دچار عارضه نخاعی سیگنالهای مغزی وارد شده به TLHC
کاهش داده شد. بعد از آن برای بازگرداندن توانایی راه رفتن
سیگنالهای فیدبک ورودی به TLHC تقویت و نشان داده شده که این
تکنیک تأثیر قابل توجهی در بازتوانی بیمار دارد. این نتیجه با
برنامه های کلینیکی برای توانبخشی بیماران دچار عارضه نخاعی
مطابقت دارد که نشان دهنده صحت عملکرد مدل پیشنهاد شده است.
1-Central Pattern Generator
2- Renshaw
3-Unit Burst Generator
4-Two- Layered Half-Center
5- Hodjkin-Huxley
6-afferent
7- locomotion training
[1] I. A. R. David A. McCreaa, "Organization of mammalian
locomotor rhythm and pattern generation," BR AIN RESEARCH
REVIEWS, vol. 57, pp. 134 - 146, 2008.
[2] P. A. Guertin, "The mammalian central pattern generator
for locomotion," Brain Reasearch Review, vol. 62, pp. 45-56,
2009.
[3] B. W. Verdaasdonk, H. F. Koopman, and F. C. Helm,
"Energy efficient and robust rhythmic limb movement by
central pattern generators," Neural Netw, vol. 19, pp.
388-400, May 2006.
[4] M. F. Simoni, "Sensory Feedback in a Half-Center
Oscillator Model," IEEE Transaction on Biomedical
Engineering, vol. 54, pp. 193-204, 2007.
[5] C. A. Williams and S. P. DeWeerth, "Resonance tuning of
a neuromechanical system with two negative sensory feedback
configurations," Neurocomputing, vol. 70, pp. 1954-1959,
2007.
[6] I. A. Rybak, K. Stecina, N. A. Shevtsova, and D. A.
McCrea, "Modelling spinal circuitry involved in locomotor
pattern generation: insights from the effects of afferent
stimulation," J Physiol, vol. 577, pp. 641-658, 2006.
[7] S. Daun, J. E. Rubin•, and I. A. Rybak, "Control of
oscillation periods and phase durations in half-center
central pattern generators: a comparative mechanistic
analysis," J Comput Neurosci, vol. 27, pp. 3–36, 2009.
[8] P. A. Guertin, "Central pattern generator for
locomotion: anatomical, physiological, and
pathophysiological considerations," Front Neurol, vol. 3,
pp. 1-15, 2012.
[9] I. A. Rybak, N. A. Shevtsova, M. Lafreniere-Roula, and
D. A. McCrea, "Modelling spinal circuitry involved in
locomotor pattern generation: insights from deletions during
fictive locomotion," J Physiol, vol. 577, pp. 617-39, Dec 1
2006.
[10] S. Daun-Gruhn, "A mathematical modeling study of
inter-segmental coordination during stick insect walking," J
Comput Neurosci, vol. 30, pp. 255-278, 2011.
[11] S. Jo, "Hierarchical neural control of human postural
balance and bipedal walking in sagittal plane," Electrical
Engineering and Computer Science, Massachusetts Institute of
Technology, 2006.
[12] S. Degallier, L. Righetti, S. Gay, and A. Ijspeert,
"Toward simple control for complex, autonomous robotic
applications: combining discrete and rhythmic motor
primitives," Auton Robot, vol. 31, pp. 155–181, 2011.
[13] H. Geyer and H. Herr, "A muscle-reflex model that
encodes principles of legged mechanics produces human
walking dynamics and muscle activities," IEEE Trans Neural
Syst Rehabil Eng, vol. 18, pp. 263-73, Jun 2010.
[14] H. Geyer, A. Seyfarth, and R. Blickhan, "Positive force
feedback in bouncing gaits," Proceedings Biological
sciences, vol. 270, pp. 2173-83, Oct 22 2003.
[15] J. Duysens, B. C. Baken, L. Burgers, F. M. Plat, A. R.
den Otter, and H. P. Kremer, "Cutaneous reflexes from the
foot during gait in hereditary spastic paraparesis," Clin
Neurophysiol, vol. 115, pp. 1057-62, May 2004.
[16] D. G. Ivashko, B. I. Prilutsky, S. N. Markin, J. K.
Chapin, and I. A. Rybak, "Modeling the spinal cord neural
circuitry controlling cat hindlimb movement during
locomotion," Neurocomputing, vol. 52-54, pp. 621-629, 2003.
[17] M. Knikou, "Neural control of locomotion and
training-induced plasticity after spinal and cerebral
lesions," Clinical Neurophysiology, vol. 121, pp. 1655–1668,
2010.
[18] M. Molinari, "Plasticity properties of CPG circuits in
humans: impact on gait recovery," Brain Res Bull, vol. 78,
pp. 22-25, Jan 15 2009.
[19] S. N. Markin, A. N. Klishko, N. A. Shevtsova, M. A.
Lemay, B. I. Prilutsky, and I. A. Rybak, "Afferent control
of locomotor CPG: insights from a simple neuromechanical
model," Ann N Y Acad Sci, vol. 1198, pp. 21-34, Jun 2010.
[20] L. E. Spardy, S. N. Markin, N. A. Shevtsova, B. I.
Prilutsky, I. A. Rybak, and J. E. Rubin, "A dynamical
systems analysis of afferent control in a neuromechanical
model of locomotion: I. Rhythm generation," J Neural Eng,
vol. 8, Dec 2011.
[21] H. C. Pinnington, D. G. Lloyd, T. F. Besier, and B.
Dawson, "Kinematic and electromyography analysis of
submaximal differences running on a firm surface compared
with soft, dry sand," Eur J Appl Physiol, vol. 94, pp.
242-53, Jun 2005.
[22] M. Hubli and V. Dietz, "The physiological basis of
neurorehabilitation-locomotor training after spinal cord
injury," J Neuroeng Rehabil, vol. 10, pp. 1-8, 2013.
|





















